Overlap Foto dalam Pemetaan Drone

Bagaimana Menentukan Frontlap dan Sidelap Optimal?
Dalam pemetaan udara menggunakan drone, kualitas orthomosaic dan model 3D sangat dipengaruhi oleh parameter overlap foto. Namun dalam praktiknya, masih banyak operator yang hanya mengikuti pengaturan default tanpa memahami implikasi teknisnya.
Padahal overlap yang tidak memadai dapat menyebabkan:
- Lubang (void) pada orthomosaic
- Distorsi model 3D
- Kegagalan alignment saat proses stitching
- Penurunan akurasi hasil akhir
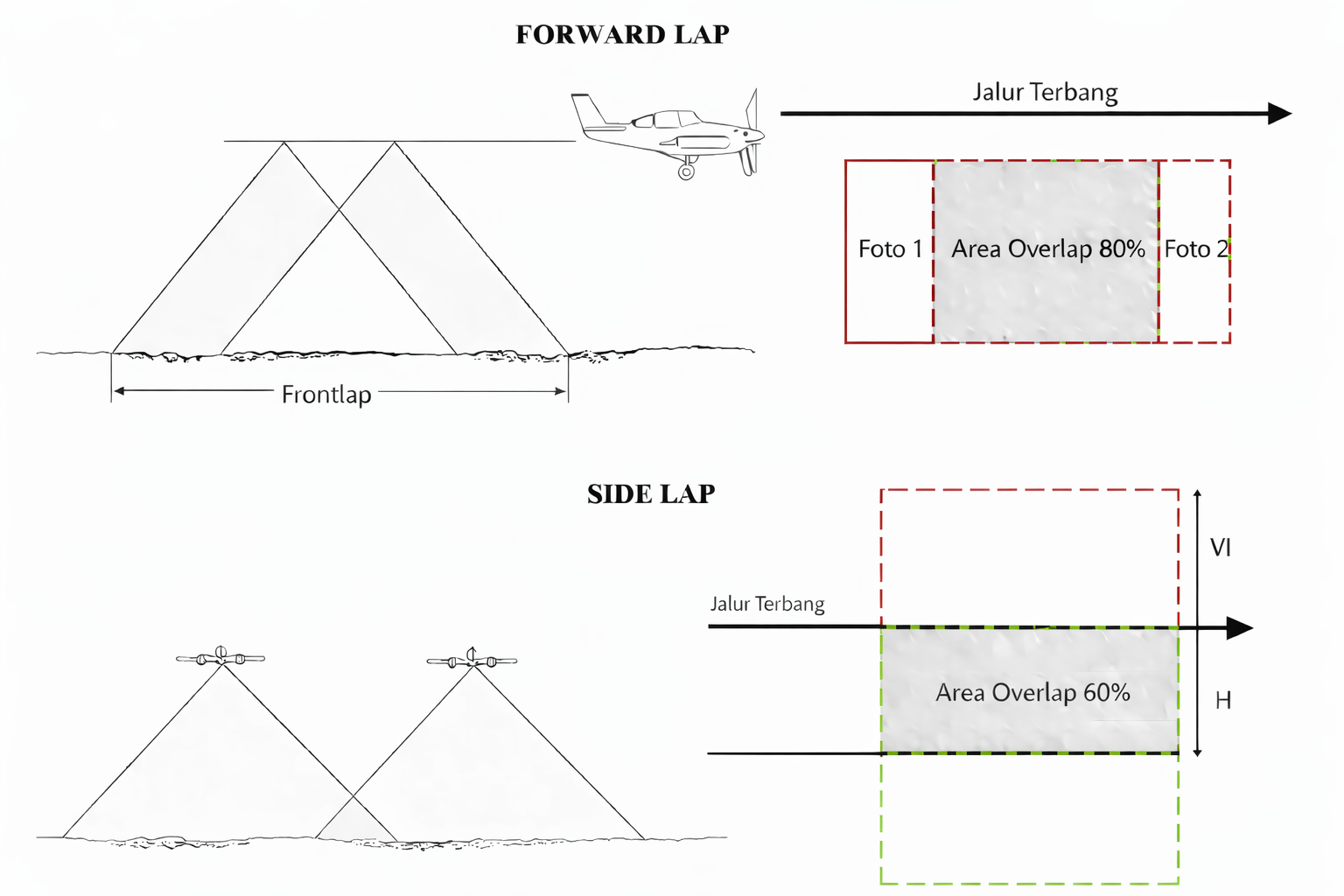
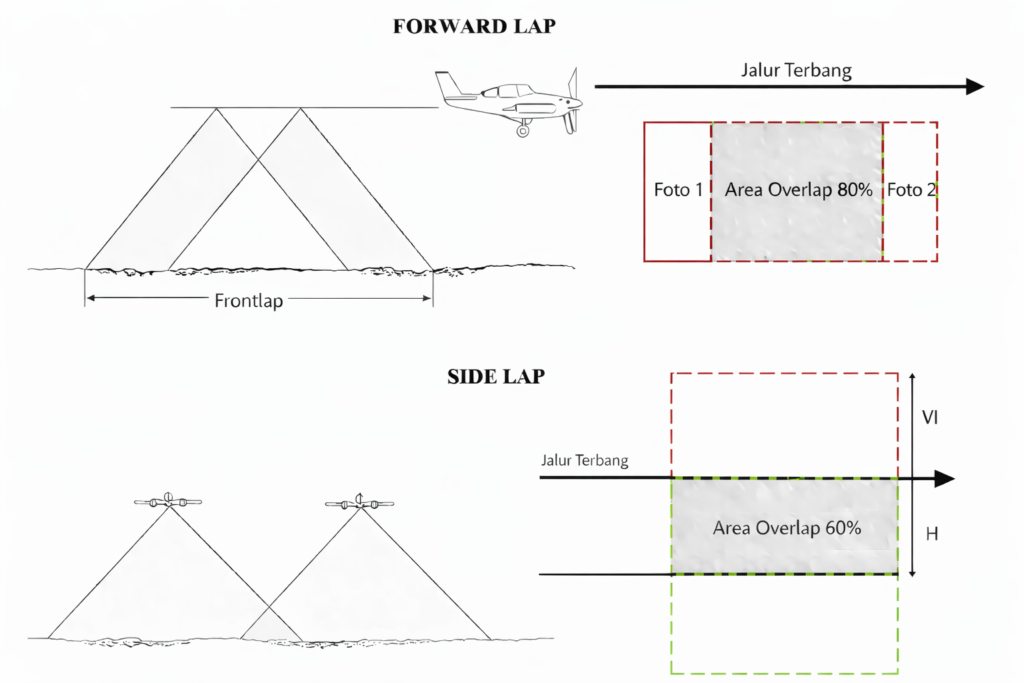
Apa Itu Frontlap dan Sidelap?
- Frontlap adalah persentase tumpang tindih foto ke arah depan (arah terbang).
- Sidelap adalah persentase tumpang tindih foto antar jalur terbang (ke samping).
Semakin tinggi overlap, semakin banyak titik identik (tie points) yang dapat dikenali oleh software fotogrametri.
Standar Minimal Berdasarkan Regulasi
Di Indonesia, acuan teknis pemetaan mengacu pada Peraturan Badan Informasi Geospasial Nomor 18 Tahun 2021.
Dalam regulasi tersebut disebutkan bahwa untuk pemetaan foto udara:
- Frontlap minimal 80%
- Sidelap minimal 60%
Nilai ini menjadi baseline agar proses fotogrametri dapat menghasilkan model yang stabil dan dapat dipertanggungjawabkan secara teknis.
Apakah Minimal Selalu Cukup?
Meskipun 80% / 60% adalah standar minimal, dalam praktik profesional sering digunakan:
- 85–90% frontlap
- 70–80% sidelap
Terutama untuk:
- Area dengan vegetasi homogen
- Permukaan tanah minim tekstur
- Proyek yang membutuhkan model 3D detail
- Survey topografi dengan kebutuhan kontur presisi
Overlap lebih tinggi meningkatkan redundansi data, tetapi juga berdampak pada:
- Jumlah foto meningkat
- Waktu terbang lebih lama
- Kapasitas penyimpanan bertambah
- Waktu processing lebih berat
Strategi Menentukan Overlap Optimal
Engineer sebaiknya mempertimbangkan:
- Tujuan proyek (2D orthomosaic vs 3D model detail)
- Kompleksitas permukaan (tekstur tinggi vs homogen)
- Luas area pemetaan
- Kapasitas baterai dan waktu operasional
- Target akurasi horizontal dan vertikal
Platform enterprise seperti DJI Mavic 3 Enterprise atau DJI Matrice 350 RTK memungkinkan pengaturan overlap secara presisi melalui flight planning otomatis, sehingga parameter dapat disesuaikan sesuai kebutuhan proyek.